 08.03.2017, 17:38
#1
08.03.2017, 17:38
#1
|
#1 |


Чебуралиссимус
|
Вскоре после появления радиолокаторов встал вопрос об увлечении дальности обнаружения воздушных целей. Эта задача решалась несколькими способами. Насколько это было возможно, радиолокационные станции старались размещать на господствующих высотах, что давало возможность не только увеличить зону просмотра, но и избежать затенения от объектов на местности. С той же целью приёмные и передающие антенны РЛС устанавливали на вышки и даже пытались поднимать на аэростатах. С ростом высоты подъёма антенн дальность обнаружения могла увеличиваться на 30-40%, в то же время первые РЛС, как правило, были не способны фиксировать воздушные цели на фоне земной поверхности.
Идея установки радиолокатора на самолет впервые появилась в Великобритании в конце 30-х годов. После начала массированных ночных налётов немецких бомбардировщиков в Англии началось производство ночных двухмоторных истребителей Blenheim IF с РЛС AI Mk III. Оснащённые радиолокаторами тяжелые истребители «Бленхеймы» очень неплохо проявили себя в ходе ночных перехватов и в дальнейшем были заменены более совершенными "Бофайтер" и "Москито" с радиолокаторами AI Mk.IV. Однако ночные истребители не являлись самолётами радиолокационного дозора в современном понимании, имеющийся на борту радиолокатор, как правило, использовался для индивидуального поиска воздушной цели и обмен информацией с другими перехватчиками и наземными пунктами управления не осуществлялся. Первым в истории прототипом самолёта ДРЛО стал экспериментальный Vickers Wellington IС, на котором вращающаяся антенна радиолокатора была размещена над фюзеляжем, а аппаратура на месте бомбового отсека.  Экспериментальный самолёт радиолокационного дозора Vickers Wellington IС Постройка этой машины на базе двухмоторного бомбардировщика «Веллингтон» была инициирована после того, как германские одиночные бомбардировщики атаковали Англию в обход наземных РЛС, развёрнутых на восточном побережье Британских островов. Впрочем, после того как из Канады и США начали массовые поставки мобильных радиолокаторов SCR-584 и GL Mk. III, от идеи самолёта радиолокационного контроля с вращающейся антенной РЛС отказались. В то же время массово выпускались «Веллингтоны», оснащённые радиолокаторами с неподвижными антеннами. Эти бомбардировщики с успехом использовались против немецких подводных лодок, всплывавших ночью для зарядки аккумуляторных батарей. В конце 1944 года имели место случаи, когда специально переоборудованные «Веллингтоны» с неподвижными антеннами использовались для наведения перехватчиков «Москито» на немецкие бомбардировщики Хейнкель-111 – носители «летающих бомб» Фау-1. Что стало первым в истории боевым применением связки «воздушный радарный пикет – перехватчик». США К середине 40-х годов прошлого столетия уровень миниатюризации и рабочих характеристик радиолокаторов достиг такого уровня, когда стало возможно размещение обзорных РЛС с дальностью обнаружения более 100 км не только на крупных двух и четырёхмоторных самолётах, но и на относительно небольших однодвигательных машинах. Первыми серийное строительство самолётов ДРЛО начали американцы. После начала боевых действий на Тихом океане ВМС США потребовалось отодвинуть зону радиолокационного контроля от своих баз и кораблей с целью получения запаса времени, необходимого для подъёма в воздух достаточного числа истребителей прикрытия. Кроме того, самолёты радиолокационного дозора могли управлять действиями собственной авиации на удалении от авианосца. В августе 1944 года в боях за Окинаву американский флот подвергся интенсивным атакам камикадзе, и американские адмиралы срочно разместили заказ на палубные самолеты ДРЛО ТВМ-3W. Данная машина была создана на базе палубного торпедоносца-бомбардировщика TBM-3 Avenger. Не дожидаясь окончания испытаний, флот заказал 40 самолётов с началом поставок в марте 1945 года.  Палубный самолет ДРЛО ТВМ-3W Впервые «летающий радар» ТВМ-3W поднялся в воздух в августе 1944 года, что совпало с официальным заключением заказа на него. На самолёте под средней частью фюзеляжа был установлен обтекатель с антенной РЛС AN/APS-20, которая создавалась в рамках проекта Cadillac. Забегая вперёд, скажу, что модернизированные варианты этой станции, работавшей в диапазоне 1-3 метра, использовались в США и НАТО до конца 70-х годов, то есть более 30 лет. Первая модификация AN/APS-20 имела очень даже неплохие для своего времени характеристики, станция в условиях отсутствия помех могла видеть цель типа «бомбардировщик» на дальности 120 км. Внешне ТВМ-3W сильно отличался от торпедоносца. Помимо каплеобразного обтекателя РЛС, для сохранения путевой устойчивости на стабилизаторах пришлось установить дополнительные вертикальные поверхности - хвостовое оперение стало трехкилевым. Посадка ТВМ-3W требовала особого внимания, так как из-за свисающего «брюха» клиренс был небольшим.  Экипаж составлял два человека – пилот и оператор РЛС. Машины первого заказа по большей части не строились заново, а переоборудовались из торпедоносцев. В роли платформы для самолёта ДРЛО «Эвенджер» оказался не идеален. Небольшой внутренний объем фюзеляжа позволял разместить лишь одного оператора РЛС, причем в весьма стесненных условиях. Хотя для первого американского палубного самолёта ДРЛО всё складывалось как нельзя удачно, его доводка затянулась. После того как проблемы с ненадёжной работой БРЭО были решены, потребовалось время для освоения серийных машин лётным и техническим составом. В итоге на войну ТВМ-3W не успели и начали поступать в строевые радиолокационные эскадрильи в начале 1946 года. За первым вариантом последовала модификация TBM-3W2 с усовершенствованным радиолокатором, который мог также работать по надводным целям и даже обнаруживать перископы подводных лодок. При проектировании TBM-3W2 предполагалось, что самолёт будет трёхместным, в состав экипажа ввели дополнительного оператора РЛС, который также заведовал связной аппаратурой и передавал данные об обнаруженных воздушных целях. Но из-за нехватки свободного места на борту, как правило, третьего члена экипажа в полёт не брали. В 1953 году в ВМС США имелось 156 самолётов TBM-3W/ W2, к тому моменту они использовались не только для контроля воздушной обстановки, но и для поиска подводных лодок совместно с противолодочными самолётами TBM-3S. Но уже через несколько лет в связи с поступлением более совершенных машин началось списание радиолокационных «Эвенджеров». Помимо США, самолёты TBM-3W2 состояли на вооружении в Канаде, Нидерландах и Морских силах самообороны Японии. Причём везде они использовались исключительно в качестве патрульных машин для контроля морской акватории. К концу 40-х годов «Эвенджер», производившийся с 1941 года, успел изрядно устареть, и ВМС потребовалась новая платформа для палубного самолёта радиолокационного дозора. В 1949 году на испытания поступил самолёт, построенный на базе палубного штурмовика AD-1 Skyraider. Первый радиолокационный вариант «Скайрейдера» с вращающейся антенной РЛС AN/APS-20 в громоздком обтекателе под фюзеляжем получил обозначение AD-3W. Эта машина строилась небольшой серией в 30 экземпляров и использовалась в основном для испытаний и доводки оборудования. Из-за характерных очертаний острые на язык моряки быстро приклеили к самолёту шутливое прозвище «Гуппи». Так же, как и на TBM-3, для улучшения путевой устойчивости на хвостовом оперении установили дополнительные шайбы. 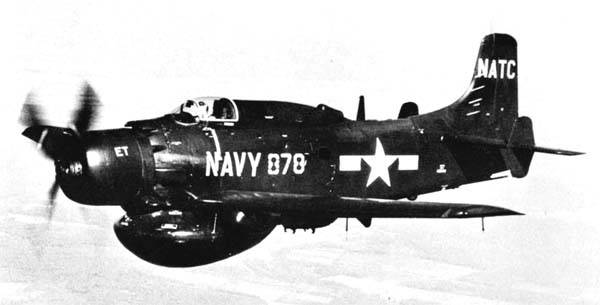 AD-3W В экипаже, состоявшем из трёх человек, существовало чёткое разделение обязанностей. Помимо пилота и оператора РЛС имелось ещё одно рабочее место для радиста, который держал постоянную радиосвязь с авианосцем или осуществлял наведение истребителей в воздухе. По опыту эксплуатации самолётов TBM-3W2 другим назначением AD-3W стал поиск подводных лодок, для чего на самолёт втиснули магнитометр. Также на «Скайрейдерах» обкатывали РЛС AN/APS-31, но она не прижилась. В итоге после всех экспериментов от противолодочных функций решили отказаться, и стандартным вариантом палубного «летающего радарного пикета» стал AD-4W с РЛС AN/APS-20А. По сравнению с первоначальным вариантом характеристики дальности обнаружения и надёжности станции были серьёзно улучшены. Эта модификация, построенная в количестве 158 самолётов, заменила на палубах авианосцев изношенные TBM-3W2. По сравнению с «Эвенджером» условия работы на борту «Скайрейдера» были гораздо комфортней, и новый самолёт обладал почти вдвое большим радиусом патрулирования – 650 км. Однако AD-4W унаследовал многие недостатки TBM-3W – самолёт был однодвигательным, что в случае отказа силовой установки при полётах над океаном оставляло не много шансов экипажу для выживания. Значительные вибрации поршневого двигателя, расположенного рядом с радиолокационной и связной аппаратурой, отрицательно сказывались на её надёжности. А из-за расположения антенны РЛС под фюзеляжем обнаружение высотных целей было затруднено. Однако командование ВМС высоко ценило радиолокационные «Скайрейдеры» и они сыграли заметную роль во время Корейской войны. Самолёты AD-3W и AD-4W постоянно висели над американскими авианосцами, предупреждая о приближении реактивных МиГов. Британский AEW.1. После того как несколько британских поршневых палубных самолётов Sea Fury FB.Mk 11 с авианосца HMS Ocean (R68) подверглись внезапным атакам МиГ-15, британцы изъявили желание закупить 50 палубных самолётов ДРЛО. В Royal Navy они получили обозначение AEW.1 и служили до 1962 года. AD-5W Дальнейшим вариантом развития радиолокационного «Скайрейдера» стал AD-5W (с 1962 года - ЕА-1Е). Всего американский флот получил 239 машин данной модификации. По сравнению с AD-3W и AD-4W в элементной базе усовершенствованного радиоэлектронного оборудования уже была значительная доля полупроводниковых элементов, что существенно уменьшило габариты и энергопотребление. Эксплуатация ЕА-1Е в ВМС США продолжалась до середины 60-х годов. Уже в начале 50-х однодвигательные самолёты радиолокационного дозора перестали устраивать американских адмиралов. После появления разведывательной информации о разработке в СССР крылатых ракет морского и воздушного базирования, американскому флоту потребовался «воздушный радарный пикет» с большими радиусом и дальностью, чем у «Скайрейдера».  E-1В Tracer Новый самолет, получивший название E-1В Tracer, оснащённый полным комплектом бортового оборудования, впервые поднялся в воздух 1 марта 1957 года. Серийное строительство «Тресеров» продолжалось до начала 1958 года, всего флоту сдали 88 машин. Базой для нового палубного «радарного пикета» послужил противолодочный S-2F Tracker. Экипаж самолёта составлял четыре человека: два пилота и два оператора РЛС. В отличие от первых послевоенных американских самолётов ДРЛО, где использовалась станция AN/APS-20, на «Трейсере» была установлена новая РЛС AN/APS-82, работавшая в диапазоне длин волн 30-100 см. Радиолокатор разместили в приподнятом примерно на метр над фюзеляжем обтекателе каплеобразной формы размерами 9,76x6,0x1,25 м. Такое решение позволило уменьшить "мертвую зону", из-за затенения металлических частей конструкции самолёта. По сравнению с AD-5W возросла дальность обнаружения и в особенности возможности селекции целей на фоне водной поверхности. В условия отсутствия помех дальность обнаружения высотной цели типа В-29 составляла 180 км, скорость обновления радиолокационной информации - 10 секунд. Впрочем, скоро выяснилось, что новый самолёт также не лишен существенных недостатков. Несмотря на увеличившиеся внутренние объёмы, на борту самолёта не нашлось места для офицера боевого управления и его функции пришлось выполнять второму пилоту. К тому же на самолёте не было аппаратуры автоматизированной передачи радиолокационных данных, и информация сначала голосом по радио передавалась на авианосец, откуда уже осуществлялось управление истребителями. Ограниченная грузоподъёмность базового шасси препятствовала введению в состав экипажа оператора обработки и передачи данных, установке более современного оборудования и расширению его состава. Кроме того, к началу 60-х поршневой палубный самолёт уже выглядел архаичным. Всё это существенно ограничило срок службы E-1В в ВМС США, последний самолёт этого типа был отправлен на базу хранения в ноябре 1977 года. Как уже говорилось, к недостаткам первых палубных самолётов радиолокационного дозора можно отнести малые свободные объёмы на борту и относительно небольшие дальность полёта и продолжительность патрулирования. С чем, однако, приходилось мириться при использовании с палубы авианосца. Однако в случае базирования на берегу ничто не мешало в качестве платформы использовать более крупные машины с большей продолжительностью полёта. PB-1W Одновременно с палубным TBM-3W флот заказал 24 четырёхмоторных PB-1W с всё той же РЛС AN/APS-20. Антенна радара располагалась под большим каплеобразным обтекателем на месте бомболюка. Кроме РЛС на PB-1W установили радиолокационную систему опознавания самолетов и кораблей "свой - чужой". Помимо самолётов с нижним расположением радиолокатора был построен как минимум один самолёт c надфюзеляжным обтекателем РЛС. Самолёты ДРЛО берегового базирования PB-1W строились на базе бомбардировщиков B-17G. По сравнению с «палубниками» тяжелые четырёхмоторные самолёты обладали в несколько раз большими дальностью полёта и продолжительностью патрулирования. Да и условия обитаемости на борту TBM-3W были куда комфортней, в отличие от палубных самолётов, оператору РЛС не приходилось из-за дефицита свободного места сидеть скрючившись. Появилась возможность иметь на борту 2-3 сменных операторов и офицера управления и наведения. Как и палубные TBM-3W, самолёты ДРЛО берегового базирования PB-1W не успели на войну. Передача первых пяти самолётов ВМС США состоялась в апреле 1946 года. Поскольку боевые действия уже закончились, с них демонтировали всё оборонительное вооружение, а число членов экипажа сократили с 10 до 8 человек. 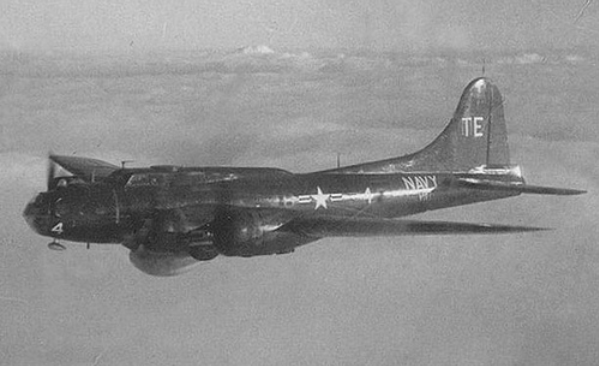 Самолёты PB-1W несли службу как на восточном, так и на западном побережье континентальной части США. В 1952 году четыре PB-1W отправили на Гавайи. Кроме контроля воздушного пространства и управления действиями истребительной авиации, во время полётов на операторов возлагались задачи по поиску подводных лодок и разведка погоды. Характеристики РЛС AN/APS-20 позволяли на дальности более 120 км обнаруживать приближающиеся ураганы и своевременно оповещать об угрозе. При этом интенсивность полётов PB-1W была высокой. По мере выработки ресурса самолёты подлежали списанию, с последним PB-1W флот расстался в 1956 году. Американские ВВС гораздо позже, чем флот начали заниматься самолётами ДРЛО и поначалу не уделяли им особого внимания. В 1951 году переоборудованию в самолёты ДРЛО подверглись три бомбардировщика В-29. Самолеты с БРЛС AN / APS-20C и станцией постановки помех получили обозначение Р2В-1S. По большей части эти машины использовались не для патрульных полётов или координации действий истребителей, а для разведки погоды и участвовали в разного рода испытательных программах, экспериментах и учениях. К тому моменту ВВС ещё не определились с ролью и местом самолётов дальнего радиолокационного дозора. В отличие от адмиралов, которые ещё помнили последствия разрушительного налёта на «Жемчужную гавань» и атаки камикадзе, генералы ВВС уповали на многочисленные наземные РЛС и реактивные перехватчики. Впрочем, вскоре после создания в СССР ядерного оружия и принятия на вооружение дальних бомбардировщиков, способных достичь континентальной территории США и вернуться обратно, американские стратеги были вынуждены расходовать значительные средства на совершенствование системы ПВО, в том числе и на самолёты и даже дирижабли, несущие мощные РЛС обнаружения воздушных целей. Но речь об этом пойдёт уже во второй части обзора. Продолжение следует… По материалам: Автор: Линник Сергей |
  |
| Новая тема Ответить |
| Метки |
| авиация |
 Линейный вид
Линейный вид

|
|
 Похожие темы
Похожие темы
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| Авиация ДРЛО (часть 13) | ezup | Специального назначения | 0 | 18.04.2017 17:34 |
| Авиация ДРЛО (часть 12) | ezup | Специального назначения | 0 | 14.04.2017 19:14 |
| Авиация ДРЛО (часть 11) | ezup | Специального назначения | 0 | 13.04.2017 20:55 |
| Авиация ДРЛО (часть 10) | ezup | Специального назначения | 0 | 07.04.2017 12:17 |
| Авиация ДРЛО (часть 2) | ezup | Специального назначения | 0 | 11.03.2017 20:02 |