RUFOR.ORG
»
Немецкий основной боевой танк Leopard 2: этапы развития.Часть 4
| Новая тема Ответить |
|
|
Опции темы | Поиск в этой теме | Опции просмотра |
 08.12.2016, 00:06
#1
08.12.2016, 00:06
#1
|
#1 |


Чебуралиссимус
|
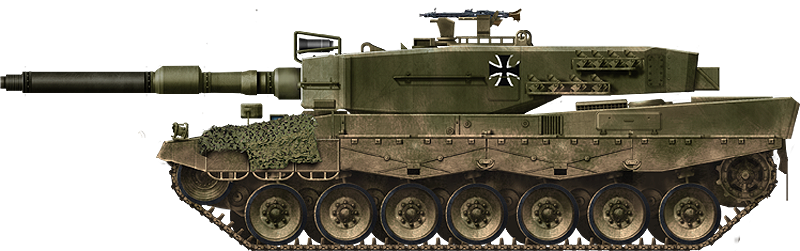 Немецкий танк Leopard 2A0 Система управления огнем танка Leopard 2A0 Сердцем башни танка Leopard 2 помимо основной пушки с ее превосходным огневым могуществом является система управления огнем (СУО). Она состоит из нескольких оптических устройств, компьютера управления огнем с соответствующими сенсорами и датчиками и системы управления вооружением. Все составляющие соединены через центральный логический распределительный блок. Единственная задача СУО - расчет точки наводки для основной пушки с тем, чтобы она поразила цель, на которую ее навел командир или стрелок-наводчик. Расчеты выполняет компьютер управления огнем, в то время как наведение пушки осуществляет система управления вооружением. Самым важным сенсорным компонентом является прицел-дальномер наводчика EMES 15, который был разработан компанией Hughes и по лицензии изготавливался Кruрр Atlas Electronic. Он обеспечивает наводчика дневным каналом и лазерным дальномером. Увеличение дневного канала составляет х12, а поле зрения 5. Лазерный дальномер имеет дальность действия от 200 до 9999 метров, но только значения до 4 км используются для расчета точки наводки. Прицел-дальномер установлен в передней правой части башни, его можно сразу узнать по большой обзорной сенсорной головке. Перед стеклами головки установлены две большие дверцы с гидроприводом, защищающие оптику от повреждений. Левая часть прицельного комплекса содержит дневной канал и лазерный дальномер, а правая часть пустая. На танках Leopard 2 более поздних вариантов здесь будет установлен тепловизионный прицел. В комплексе имеется головное зеркало, стабилизированное в двух плоскостях. Оно обеспечивает в боевых условиях чрезвычайно высокое качество стабилизации линии визирования наводчика. Наводчик видит изображение с прицела в своей окулярной части бинокулярного типа. Одновременно на изображение накладывается визирная нить. Визирная нить используется наводчиком не только для наведения на цель, но также для определения дистанции до цели в чрезвычайных ситуациях. В нижней части картинки наводчик видит цифровую пятиразрядную панель. На левый символ выводится F или 0, что показывает статус готовности основной пушки к открытию огня. Следующие три разряда показывают дистанцию до подсвечиваемой цели. Правый разряд панели показывает тип боеприпаса, введенный заряжающим.  То, что видит в свой прицел-дальномер EMES 15 наводчик. Внизу панель с пятью символами Поскольку так необходимый тепловизионный прицел был еще недоступен в начале серийного производства, то 200 танков из первой партии были оборудованы прицелом с усилением яркости изображения PZB 200. Он был установлен наверху маски пушки. Изображение выводилось на небольшой монитор, установленный справа от места наводчика. PZB 200 планировался только как промежуточное решение, но, по крайней мере, он позволил получить некоторые возможности ведения ночного боя. Контрольная панель наводчика, установленная справа от его окулярной части, используется для конфигурации прицельного комплекса. Вспомогательный прицел FERO-Z18 установлен параллельно основной пушке слева от наводчика. Этот монокулярный прицел не стабилизирован, измерение дальности выполняется исключительно с помощью визирных нитей. Его центр имеет точку наводки, а слева дистанционные метки для MZ, КЕ и MG. Они показывают дистанцию, которая вводится наводчиком в СУО. 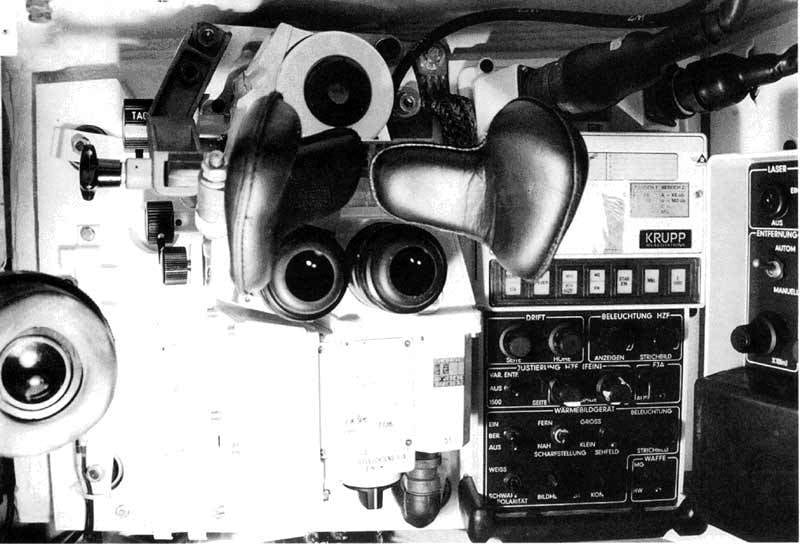 Место наводчика слева направо: окуляр оптического прицела FERO-Z18, в середине – окулярная часть главного оптического прицела EMES 15 (бинокуляр), рядом с ним панель управления огнем наводчика Впервые в современном танкостроении Leopard 2 был оборудован полностью стабилизированным панорамным прицелом командира PERI-R17. Он может вращаться независимо от башни и позволяет командиру выполнять поиск целей, наводить вооружение танка или передавать цели наводчику. Прицел имеет только дневной канал. Поскольку в нем нет встроенного лазерного дальномера, измерение дальности может выполняться только при помощи визирных нитей. Прицеп PERI установлен на крыше башни справа перед люком командира. Благодаря своим небольшим размерам он вряд ли может мешать обзору командира. Командир управляет PERI при помощи фиксированной рукоятки управления, расположенной справа, и кулисного переключателя. Последний используется для выбора скорости вращения или подачи команды на автоматическое перемещение с постоянной скоростью. Его здесь не нужно путать с автоматическим сопровождением целей. Рукоятка управления позволяет направлять PERI с помощью клавишного переключателя, а также стрелять из пушки и задействовать лазерный дальномер наводчика. Кроме того, имеются переключатели для выбора необходимого рабочего режима. Кроме оптических сенсоров, которые обеспечивают данные об относительной позиции и дистанции до цели, а также значения, связанные со стабилизацией прицелов, танк также оборудован еще несколькими сенсорами и датчиками. Самый заметный датчик установлен на крыше башни в задней ее части, он выдает данные о скорости и направлении ветра. Так называемый датчик бокового ветра установлен на небольшой штанге и используется только на двух версиях танка Leopard 2 (сегодня он повторно установлен на Leopard 2HEL). Датчик вертикали установлен под основной пушкой. В нем имеется гироскоп, измеряющий наклон цапф пушки. На левом борту башни возле ее привода находится датчик положения башни, который выдает горизонтальное положение башни относительно корпуса. Еще два датчика положения, установленные по обеим сторонам пушки, передают в прицелы EMES и PERI данные о вертикальном положении пушки. Под пушкой размещается еще один гироскоп вооружения, измеряющий вертикальное и горизонтальное перемещения пушки. Подобный же датчик, измеряющий перемещения башни, установлен в секции электроники в корме башни. Еще один датчик на внутренней маске пушки выдает вертикальное положение пушки относительно башни. Наконец, еще один датчик установлен вне башни. Он соединен с трансмиссией и выдает данные о скорости и направлении движения танка (вперед/назад).  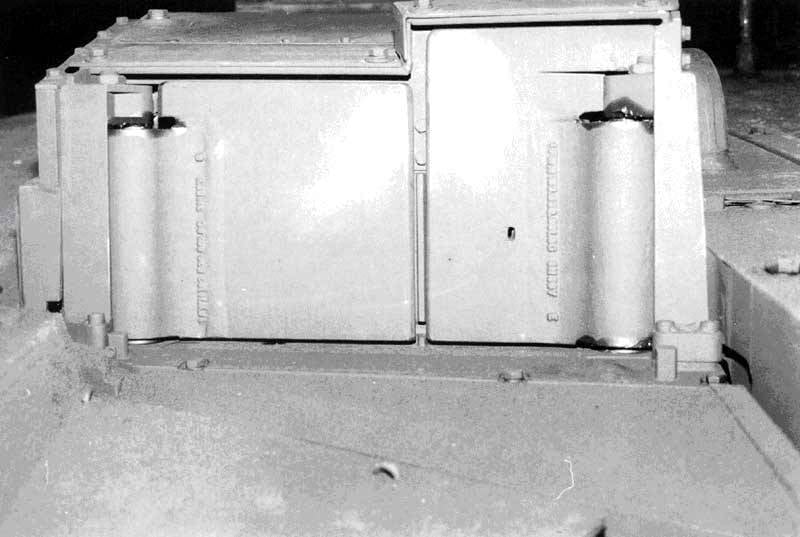  Прицел-дальномер наводчика EMES 15 В секции электроники установлен компьютер управления огнем. Он собирает данные с различных датчиков. В него также загружены данные по баллистике боеприпасов различных типов. Дополнительные значения передаются с контрольной панели компьютера, установленной справа от наводчика. К вводимым вручную данным относятся наклон цапф и компенсация смещения орудия, высота над уровнем моря, температура воздуха и боеприпаса, а также данные датчика бокового ветра и лазерного дальномера. Контрольная панель имеет центральный переключатель, который позволяет выбирать различные значения. Далее производится настройка при помощи вращающихся ручек, которые расположены в нижней части панели. С целью предотвращения случайного вращения рукояток, они, как правило, защищены пластиковой крышкой. Основываясь на разных значениях, компьютер управления огнем рассчитывает значения коррекции угла места и упреждения для пушки, и по цели, сопровождаемой оптическими приборами, открывается огонь. Кроме того, компьютер управления огнем обеспечивает несколько функций, которые позволяют уменьшить или предотвратить промах при обстреле цели. К таким функциям относятся автоматическая коррекция наклона цапф, динамическое упреждение и компенсация смещения. Угол наклона цапф оказывает влияние на точку наводки основной пушки и поэтому необходимо определение и коррекция углов вертикального или горизонтального наклона машины. Динамическое упреждение вводилось для варианта Leopard 2AV. но там оно было постоянно активным. На танке Leopard 2 была введена небольшая кнопка на ручке управления наводчика, которую необходимо было нажать, чтобы активировать эту функцию. При динамическом упреждении, порой также называемом боковым упреждением, измеряется движение цели во время наведения на нее и полученные данные используются для настройки точки наводки основной пушки. Наводчик подсвечивает цель и при нажатии на панели управления кнопки динамического упреждения сопровождает цель не менее двух секунд. На основе дальности до цели и перемещения башни во время активации угла упреждения компьютер рассчитывает скорость и направление цели. Динамическое упреждение должно применяться только по движущейся цели, так как в противном случае это может привести к ошибкам в расчетах точки наводки. Компенсация смещения решается подобным же образом, как и динамическое упреждение. Только вместо движения цели здесь учитывается движение самого танка. Таким образом, функция выработки поправок на смещение измеряет и компенсирует скорость и направление движения танка относительно цели. В то время как компьютер управления огнем отвечает только за расчет точки наводки, система управления огнем также выполняет другие задачи. Некоторые из них решает центральный логический блок распределения ZLHV. Прежде всего, он отвечает за систему энергоснабжения башни, включая предохранители. С другой стороны, он также активирует функции СУО, базирующиеся на логических операциях. Например, откроет ли пушка огонь, если пушка и прицел наведены на одну и туже цель ZLHV также обеспечивает разные рабочие режимы СУО. Башня и основная пушка танка Leopard 2 наводятся при помощи электрогидравлического привода WNA-H22. Он состоит из приводов вертикального и горизонтального движения, гидросиловой установки HKV и блока управления. Гидравлическая система использует закрытый контур с 36 литрами гидравлической жидкости. Большая часть ее содержится в гидравлическом баке установки HKV. Сама HKV размещается в небольшом отделении в корме башни справа и доступ к ней осуществляется через большой люк В крыше корпуса. По сути, она представляет собой электродвигатель, приводящий в действие аксиально-поршневой насос. Насос забирает гидравлическую жидкость из бака, сжимает ее и направляет в гидравлический аккумулятор. Из него жидкость проходит по системе труб к приводам и от них обратно. В зависимости от режима работы СУО система HKV может создать давление до 160 атмосфер. Поскольку система сильно нагревается, ее необходимо охлаждать наружным воздухом и постоянно мониторить через СУО. При повышении температуры выше предельных значений экипаж получает оповещение и, в конечном счете, СУО переключается в более простой рабочий режим (например, без стабилизации вооружения). Привод горизонтального наведения установлен внутри по левому борту башни. Он включает гидравлическую трансмиссию, которая соединяется с погоном башни посредством зубчатого редуктора. Для предотвращения вращения башни рабочий тормоз, входящий в состав привода, всегда включен. Он выключается за счет нажатия аварийных выключателей на рукоятках управления командира или наводчика. В аварийных ситуациях тормоз может быть выключен небольшой рычагом, установленным на корпусе привода горизонтального наведения. Привод вертикального наведения основной пушки представляет собой гидравлический цилиндр, наполненный гидравлической жидкостью. Привод вертикального наведения установлен под пушкой. Управление башней и пушкой осуществляется главным образом наводчиком посредством ручки управления. Ее перемещение приводит к движению головного зеркала в прицеле EMES. Изменение положения головного зеркала передается в систему управления вооружением. Компьютер управления огнем рассчитывает точку наводки и электрогидравлическая система WNA направляет орудие соответствующим образом. Необходимо заметить, что обычно прицел и пушка не используют ОДНУ и ту же ЛИНИЮ визирования. Как уже сказано выше, пушка всегда следует за прицелом, выполняющим ведущую роль при всех перемещениях. Несмотря на то, что обе системы, как привод башни, так и привод пушки, являются гидравлическими, они позволяют выполнять очень точные перемещения, что также является индикатором чрезвычайно высокого качества проектирования и производства. Скорость вертикальной переброски пушки составляет 0,0055 - 45/с, вращение башни возможно в пределах 0,0115 - 40/с, а полный оборот башни на 360 может быть выполнен за 9 секунд. Для аварийных ситуаций наводчик имеет резервные ручные приводы башни и пушки, представляющие собой два ручных насоса с вращающимся рукоятками. Один естественно предназначен для вращения башни, а второй для подъема-опускания орудия. Аварийный режим, как правило, является следствием отсутствия электроэнергии, когда гидроустановка HKV не работает и в основной системе происходит потеря гидравлической жидкости. По этой причине в аварийном режиме используется второй гидравлический контур. Он заполняется из масляного бака основного прицела наводчика, приводящего в действие передние дверцы, и нагнетает масло в два обычных привода горизонтального и вертикального наведения. Ручной привод позволяет очень точно, но очень медленно перемещать пушку и башню. Чтобы поднять или опустить пушку на один градус, необходимо сделать рукояткой четыре оборота. Для простого горизонтального поворота башни также на один градус необходимо другой рукояткой сделать три оборота. Также необходимо отметить, что наводчик тоже человек и, вращая эти рукоятки, он очень быстро устанет, после чего все перемещения замедлятся. Поэтому ему может помочь водитель, у которого есть возможность поворачивать машину целиком. СУО танка Leopard 2 имеет три основных режима работы и семь подрежимов. Основные режимы определяют функциональность СУО, например стабилизацию пушки и прицела. Подрежимы определяют как используются вооружение и прицелы. В то время как основные режимы могут выбираться напрямую, для подрежимов это возможно лишь частично. Имеющиеся подрежимы: RH: Наводчик наводит пушку с помощью прицелов EMES ИЛИ FERO КH: Командир наводит пушку, используя PERI. В этом режиме линии визирования для PERI и пушки согласуются, а командир использует свою рукоятку управления. Сценарием для этого подрежима может быть выход из строя EMES и/или наводчика. KW: Командир наводит пушку с помощью EMES. Сформированное EMES изображение выводится в окулярную часть командира. Он наводит башню/пушку с помощью своей ручки управления. КР: Командир направляет PERI, что является стандартной ситуацией. Командир только контролирует PERI кнопочным переключателем на рукоятке управления. ZU: Наблюдение за целью. Командир поворачивает PERI на линию визирования EMES, это означает, что оба прицела направлены на одну цель, но независимо друг от друга. Этот подрежим используется для контроля наводчика без переключения на прицел EMES. ZZU: Дополнительное наблюдение за целью. Командир направляет изображение с EMES в свой окуляр. Линия визирования PERI не меняется. ZZ: Целеуказание. Командир первый включает подрежим КН, который означает, что основная пушка и EMES принудительно выводятся на линию визирования PERI. После этого он передает управление обратно наводчику. Этот режим используется в случае, если командир обнаруживает цель и хочет передать наводчику дальнейшее наблюдение и проведение атаки. 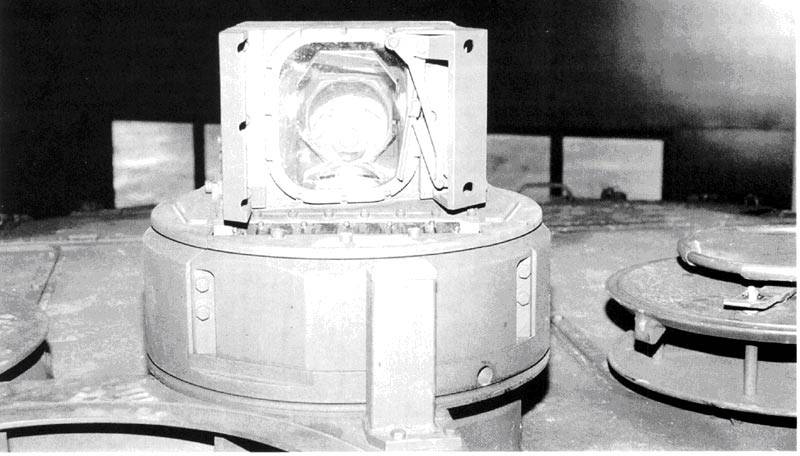 Панорамный прицел командира PERI-R17 Три основных режима СУО танка Leopard 2 называются STAB EIN, BEOBACHTEN и TURM AUS. Вариант Leopard 2AV имел четвертый режим MARSCH, но на последующих моделях его уже не было. STAB EIN (стабилизация включена). Это самый важный рабочий режим, так как все системы функционируют, и активная мощность Leopard 2, как комплексной системы вооружения, может быть полностью использована. Стабилизация всех прицелов и управление вооружением активны. Динамическое упреждение, компенсация смещения и коррекция наклона используются для вычисления точки наводки танковой ПУШКИ. Подрежимы RH, KH, KW, КР, ZZ, ZU и ZZU доступны. BEOBACHTEN (наблюдение). Этот режим используется в случае, если танк стоит на месте, но все системы функционируют. Он также используется в случае поломки привода башни или СУО. Он отличается от режима STAB EIN главным образом отсутствием стабилизации прицелов наводчика и командира. В этом режиме танк больше не способен воевать в движении. При этом ручка управления наводчика должна быть механически связана с приводом башни. Наводчик теперь направляет пушку и прицел-дальномер EMES параллельно. При необходимости наводчик может также использовать аварийные приводы башни. Динамическое упреждение и компенсация смещения пушки недоступны. Коррекция угла наклона еще возможна, рассчитываются значения коррекции вертикального наведения и упреждения. Подрежимы RH, КР, ZU и ZZU доступны. В режиме BEOBACHTEN привод башни не обязан обеспечивать стабилизацию, поэтому он работает при существенно меньшем давлении. Это приводит к низкому энергопотреблению, а также более редкому включению в работу аксиально-поршневого насоса. Это позволяет дольше работать без запуска основного двигателя. TURM AUS (башня отключена). Это уже ранее упомянутый аварийный режим работы башни и вооружения. Он, как правило, активируется при полной неработоспособности электроники и/или приводов башни Наводчик может наводить башню с пушкой только при помощи двух вращающихся рукояток. Прицеливание возможно только с помощью вспомогательного прицела, а ведение огня за счет аварийного генератора. Он установлен справа от танковой пушки сразу за местом наводчика. Механической рукояткой вырабатывается электрический разряд, инициирующий снаряд в пушке. Водитель при этом обеспечивает горизонтальные перемещения машины по указаниям наводчика. Прицел командира не может быть задействован и единственно доступным остается подрежим RH. Система управления огнем танка Leopard 2 позволяет поражать неподвижные и движущиеся цели во время движения на максимальной скорости практически по любой местности. Возможно уничтожение целей на максимальной дальности 4000 метров первым выстрелом. Действительная дальность огня составляет 2500 метров. Среднее отклонение снаряда на дистанции 4000 метров составляет 80 см. При стрельбе с раздельной наводкой противотанковыми кумулятивными снарядами танк способен поражать цели на дальностях до 10000 метров. Важно отметить возможность танка Leopard 2 атаковать медленно летящие воздушные цели. В общем и целом, это могут делать все современные ОБТ, но интенсивную подготовку этой методике проходят только экипажи танков Leopard, а также экипажи танков Т-80/90 российской армии. Наводчик захватывает эти цели, например вертолеты, таким же образом как наземные цели, но в режиме STAB EIN. Могут быть атакованы цели, летящие со скоростью до 250 км/ч. Поскольку скорости воздушных целей высоки, то шанс успешного поражения их ниже, чем целей на земле. Но, как правило, каждое попадание или даже промах мимо цели (естественно на небольшой дистанции от нее) приводит к ее поражению. Это связано со слабой защитой вертолетов, особенно от 120-мм бронебойных подкалиберных снарядов. Продолжение следует... Перевод: |
  |
| Новая тема Ответить |
| Метки |
| танк |
 Линейный вид
Линейный вид

|
|
 Похожие темы
Похожие темы
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| Немецкий основной боевой танк Leopard 2: этапы развития. Часть 10 | ezup | Танки | 0 | 07.01.2017 11:50 |
| Немецкий основной боевой танк Leopard 2: этапы развития. Часть 5 | ezup | Танки | 0 | 14.12.2016 00:18 |
| Немецкий основной боевой танк Leopard 2: этапы развития.Часть 3 | ezup | Танки | 0 | 06.12.2016 23:19 |
| Немецкий основной боевой танк Leopard 2: этапы развития.Часть 2 | ezup | Танки | 0 | 01.12.2016 00:16 |
| Немецкий основной боевой танк Leopard 2: этапы развития. Часть 1 | ezup | Танки | 0 | 01.12.2016 00:09 |