 04.12.2014, 01:58
#1
04.12.2014, 01:58
#1
|
#1 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||


Чебуралиссимус
|
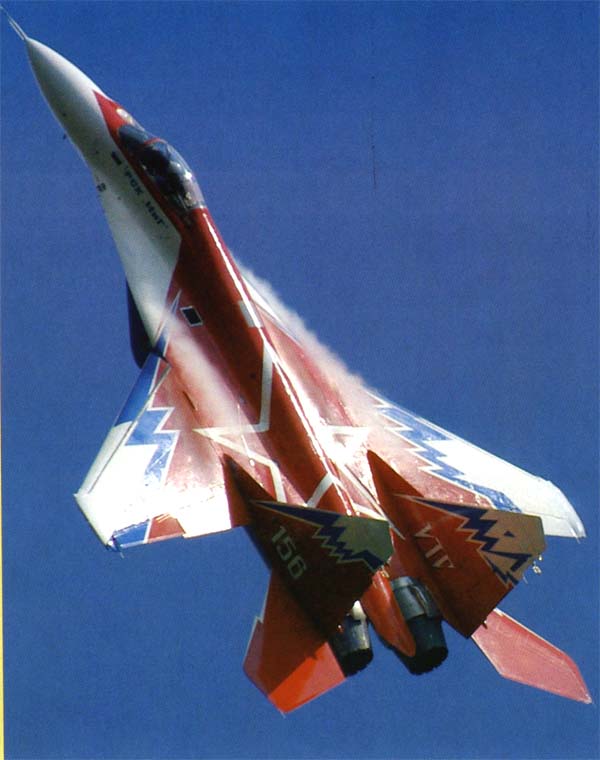
 МиГ-29ОВТ МиГ-29ОВТ
Одной из главных новинок авиасалона МАКС-2005 стал опытный сверхманевренный многофункциональный истребитель МиГ-29ОВТ, уникальный комплекс пилотажа на котором в ходе программы показательных полетов выставки демонстрировал старший летчик-испытатель РСК МиГ Герой России Павел Власов. Самолет создан на базе предсерийного истребителя МиГ-29М 156 и является по сути летающей лабораторией для отработки двигателей РД-33 с всеракурсным отклонением вектора тяги (ОВТ) - так называемой системой КЛИВТ (Климовский вектор тяги), разработанной санкт-петербургским Заводом им. В.Я. Климова, - и исследования влияния ОВТ на пилотажные и тактические возможности истребителя. Эта машина, приступившая к первым полетам с ОВТ в августе 2003 г., уже демонстрировалась на предыдущем МАКСе - правда тогда только на статической стоянке. За прошедшие два года создателям и испытателям самолета и его двигателей удалось накопить необходимый опыт полетов с ОВТ, и теперь МиГ-29ОВТ предстанет перед зрителями во всей своей красе - в небе над Жуковским. Те, кто уже видел полеты этой машины, утверждают, что МиГ-29ОВТ по своим маневренным возможностям не уступает, а в чем-то даже превосходит традиционную звезду показательного пилотажа - сверхманевренный Су-30МКИ. Однако дело даже не в демонстрации уникальных фигур маневрирования: по мнению главного конструктора РСК МиГ, директора программ МиГ-29К/КУБ, МиГ-29М/М2 и МиГ-2ЭОВТ Николая Бунтина, всеракурсное отклонение вектора тяги на новом миге дает ему принципиально новые возможности не только на режимах сверхманевренности, но и при традиционном пилотировании. Уже известно, что двигателями с подобной системой ОВТ будут оснащаться будущие серийные истребители МиГ-29М и МиГ-29М2. Первые опыты по практической реализации идеи управления вектором тяги двигателей реактивных самолетов имеют уже почти полувековую историю, когда в 1957 г. конструкторы британской фирмы Хоукер Сиддли (Hawker Siddley, ныне входит в состав концерна British Aerospace) приступили к проектированию первого своего вертикально взлетающего самолета с ТРД - опытного Р. 1127 Кестрел, прототипа будущего всемирно известного Харриера. Оговоримся сразу: термины управление вектором тяги (УВТ) и отклонение вектора тяги (ОВТ) в целом идентичны, и употребление того или другого является, скорее, делом вкуса. Английский эквивалент - thrust vector control (TVC), чаще других используемый в англоязычной литературе, - ближе к первому. На РСК МиГ и Заводе им. В.Я. Климова предпочитают второй, что, однако, не меняет сути (хотя, возможно, подчеркивает отличие их системы от применяемых на самолетах Сухого двигателей с УВТ). Но вернемся к Кестрелу. На этом самолете для обеспечения вертикального взлета, переходных режимов, крейсерского полета, а затем вертикальной посадки единственный имевшийся на борту двигатель Пегас (Pegasus) снабдили двумя парами расположенных один за другим, по ту и другую стороны от центра тяжести машины, поворотными сопловыми насадками, которые, поворачиваясь, изменяли направление реактивной струи ТРДД от вертикальной вниз до горизонтальной. Кестрел впервые поднялся в воздух в 1960 г., а спустя шесть лет по отработанной на нем схеме был создан Хар-риер, запущенный позднее в серийное производство и поступавший на вооружение ВВС и ВМС Великобритании, корпуса морской пехоты США (лицензионный вариант AV-8), палубной авиации Испании и Индии. До сих пор такие самолеты, претерпевшие немало модификаций, несут свою службу в армиях и на флотах этих и некоторых других стран, являясь сейчас, по сути, единственным в мире эксплуатируемым типом реактивного самолета вертикального взлета и посадки (СВВП). Близкая к реализованной на Кестреле и Харриере схема обеспечения вертикального взлета и посадки нашла применение и на первом советском реактивном СВВП Як-36, поступившем на испытания в 1963 г. На нем в носовой части фюзеляжа устанавливалось два турбореактивных двигателя Р27-300, каждый из которых имел по одному поворотному соплу в районе центра тяжести самолета. Як-36 остался чисто экспериментальной машиной, однако на основе опыта его постройки и испытаний в ОКБ им. А.С. Яковлева к 1970 г. был создан и передан на испытания корабельный СВВП Як-36М, позднее поступивший в серийное производство и принятый на вооружение ВМФ Советского Союза под обозначением Як-38. Основной подъемно-маршевый двигатель Р27В-300 этого самолета имел два сопловых насадка по бокам хвостовой части фюзеляжа, поворот которых изменял вектор тяги от вертикального к горизонтальному и обратно. Вертикально взлетающие штурмовики Як-38 несли службу на тяжелых авианесущих крейсерах типа Киев до начала 90-х гг. Развитием концепции первого советского серийного СВВП стал поступивший в 1987 г. на испытания сверхзвуковой истребитель Як-41М. Как и Як-38, он имел комбинированную силовую установку из двух подъемных и одного подъемно-маршевого двигателя. Однако последний - ТРДДФ Р79В-300 - имел одно осесимметричное сопло, расположенное по оси самолета между хвостовыми балками фюзеляжа и способное, благодаря оригинальной трехсегментной схеме, изменять вектор тяги в диапазоне 95- от горизонтального до вертикального вниз и даже чуть вперед . В силу ряда причин Як-41М остался в виде всего трех опытных самолетов, и в серийное производство не передавался. Тем не менее широко известно, что отработанная на нем схема управления вектором тяги подъемно-маршевого двигателя была позднее востребована в США и вскоре найдет применение на серийной модификации перспективного истребителя вертикального взлета и укороченной посадки F-35B для Корпуса морской пехоты этой страны, а также ВМС и ВВС Великобритании. Завершая краткий экскурс в историю управления вектором тяги на реактивных СВВП, необходимо отметить, что идея поворота сопел на них диктовалась единственной целью - обеспечить отклонение реактивной струи двигателя для создания вертикальной тяги на взлете и посадке. Правда, опыт боевого применения Харриеров показал, что управляя вектором тяги в полете (а не только на взлете, посадке и при выполнении зависания), можно получить определенные тактические преимущества перед самолетами противника в воздушном бою. Можно считать, что этот вывод в определенной мере и послужил в середине 80-х гг. толчком к развитию идеи управления вектором тяги на маневренных истребителях четвертого и пятого поколений, для которых вовсе не ставилась задача взлетать или садиться вертикально, но введение новых схем управления самолетом могло сулить важные преимущества в процессе ведения ближнего воздушного боя. К экспериментальным работам в области расширения маневренных характеристик истребителей за счет внедрения управления вектором тяги в США приступили во второй половине 80-х гг. За относительно короткий период времени здесь было разработано несколько различных схем и конструкций УВТ и построены четыре летающие лаборатории на базе истребителей F-15, F-16 и F-18. Кроме того, совместно с германскими специалистами был спроектирован и изготовлен в двух экземплярах экспериментальный сверхманевренный самолет Х-31, а в рамках работ по истребителю пятого поколения (программа ATF) построены два опытных самолета YF-22. На всех этих машинах, наряду с отработкой других новых технических решений, исследовались те или иные способы управления вектором тяги и различные конфигурации и конструкции поворотных сопел двигателей. Первым среди летающих лабораторий для исследования влияния УВТ на маневренные характеристики истребителя в США стал самолет-демонстратор F-15S/MTD (STOL/Maneuvering Technology Demonstrator - демонстратор технологий короткого взлета и посадки и маневренности), построенный на базе первого предсерийного двухместного учебно-боевого истребителя F-15B (серийный 71-0290). На нем было дополнительно установлено переднее горизонтальное оперение, а штатные двигатели F100-PW-100 оснастили экспериментальными плоскими соплами с отклонением вектора тяги в вертикальной плоскости и возможностью реверсирования тяги. Первый полет F-15S/MTD состоялся 7 сентября 1988 г., а 10 мая 1989 г. на нем было осуществлено первое изменение вектора тяги в полете. 2 марта 1990 г. на F-15S/MTD впервые опробовали использование реверса тяги при боевом маневрировании. Испытания F-15S/MTD завершились в 1991 г., результаты влияния УВТ двигателей с плоским соплами на маневренные характеристики истребителя в вертикальной плоскости были признаны положительными. К этому времени подобная идея управления вектором тяги двигателей с плоскими соплами для повышения маневренности самолета по тангажу нашла отражение и в конструкции двух опытных экземпляров перспективного истребителя пятого поколения YF-22 фирмы Локхид Мартин (Lockheed Martin), поступивших на испытания в 1990 г. Первый из них оснащался опытными двигателями General Electric YF120, а второй - Pratt & Whittney YF119, оба - с плоскими соплами с отклонением вектора тяги в вертикальной плоскости на угол до 20 вверх и вниз. Первое ОВТ на YF-22 1 с двигателями YF120 было выполнено 15 ноября 1990 г. Основной цикл испытаний двух самолетов YF-22 (и представленных на конкурс с ними двух YF-23 фирмы Нортроп Грумман (Northrop Grumman) с такими же двигателями) был завершен к концу 1990 г. Для будущего серийного производства ВВС США выбрали самолет фирмы Локхид и двигатель Пратт-Уитни. Первый предсерийный F-22A с двигателями F119-PW-100 поступил на испытания в 1997 г. На нем и на всех последующих самолетах этого типа (а к настоящему времени их построено уже более трех десятков) используются плоские сопла с УВТ в вертикальной плоскости, что значительно повышает маневренные возможности истребителя на малых скоростях и больших углах атаки. Следующей американской летающей лабораторией для исследования поведения истребителя на больших углах атаки, на которой отрабатывалось УВТ, стал самолет F-18 HARV (High Alpha Research Vehicle - аппарат для исследования больших углов атаки), построенный в 1987 г. на базе шестого предсерийного истребителя F-18 с двигателями F404-GE-400. Вначале он был укомплектован только экспериментальной системой дистанционного управления и до 1989 г. выполнил 101 полет по первому этапу испытаний, в ходе которых достигал углов атаки до 55. Затем машину дооборудовали тремя специальными створками (дефлекторными панелями) из содержащего хром и сталь высокотемпературного никелевого сплава, расположенными за соплами двигателей, которые позволяли производить отклонение вектора тяги как в вертикальной, так и в горизонтальной плоскости. Испытания F-18 HARV, оснащенного системой ОВТ, которые начались 12 июля 1991 г., продемонстрировали существенное повышение маневренности на средних углах атаки и возможность управления и устойчивого полета истребителя на больших углах вплоть до 70, в т.ч. эффективного управления по крену на углах атаки до 65 (ранее оно было возможно только на углах до 35). В дальнейшем самолет дополнительно оснастили специальными подвижными управляющими поверхностями в носовой части фюзеляжа для управления в боковом канале. С ними в июле 1995 - сентябре 1996 гг. он прошел заключительный третий этап испытаний, на которых оценивалось влияние УВТ и дополнительных поверхностей на управляемость самолета по тангажу, крену и рысканью на больших углах атаки. Всего на F-18 HARV выполнили 385 полетов, последний из них состоялся 6 сентября 1996 г. Подобная система УВТ с тремя отклоняемыми створками позади сопла двигателя F404-GE-400 (на этот раз только из графитоэпоксидных композиционных материалов) нашла применение и на экспериментальном сверхманевренном самолете Х-31. Он был разработан совместными усилиями специалистов американской фирмы Рокуэлл (Rockwell International) и германской Дойче Аэроспейс (Deutsche Aerospace) в интересах создания перспективных истребителей следующего поколения для исследования возможностей пилотирования на сверхбольших углах атаки при ведении ближнего воздушного боя. Первый экземпляр Х-31 впервые поднялся в воздух 11 октября 1990 г., второй - 19 января 1991 г. Постепенно расширяя диапазон полетных углов атаки, 6 ноября 1992 г. на втором Х-31 был впервые выполнен управляемый полет с углом атаки 70 и осуществлено первое управляемое вращение по крену на этом угле. 29 апреля 1993 г. на нем впервые выполнили уникальный закритический маневр - разворот с минимальным радиусом (всего 130 м!), получивший название маневр Хербста (Herbst Maneuver). На завершающей стадии испытаний Х-31 привлекался к учебным воздушным боям с истребителями F/A-18 и некоторыми другими американскими тактическими самолетами, что позволило оценить влияние сверхманевренности на исход воздушных поединков. Результаты превзошли все ожидания. В значительной степени они определялись наличием на Х-31 всеракурсного УВТ, позволявшего эффективно управлять самолетом по тангажу, крену и курсу на углах атаки до 70╟. Всего на двух самолетах Х-31 (второй из них был потерян в аварии 19 января 1995 г.) выполнили 580 полетов, в т.ч. 21 в Европе - в рамках подготовки и участия в авиасалоне в Ле-Бурже в 1995 г. Пилотирование сверхманевренного Х-31 освоили 14 американских и немецких летчиков. Программа испытаний самолета завершилась 13 мая 1995 г. Следующее направление исследований управления вектором тяги было связано в США с применением поворотных осесимметричных сопел. Были разработаны две принципиальные схемы таких сопел: с отклонением всего выходного устройства (проекты MPJM/BBN для двигателя F100-PW-100 фирмы Пратт-Уитни и GEATRV фирмы Дженерал Электрик) и с поворотом только сверхзвуковой (расширяющейся) части сопла (программы P/YBBN фирмы Пратт-Уитни и AVEN фирмы Дженерал Электрик). До летных экспериментов с первыми двумя дело не дошло, а всеракурсные управляемые сопла P/YBBN и AVEN прошли отработку на летающих лабораториях, созданных на базе истребителей F-15HF-16. Сопло AVEN (Axisymmetric Vectoring Exhaust Nozzle - осесимметричное реактивное сопло с У ВТ) было в 1993 г. установлено на двигатель Fl 10-GE-100 экспериментального самолета NF-16D. Последний построили в 1988 г. на базе серийного истребителя F-16D Block 30 ╧86-0048 по программе VISTA (Variable stability In-flight Simulator Test Aircraft - опытный самолет для летной оценки изменяемой устойчивости). Программа испытаний УВТ на нем получила название MATV (Multi Axis Thrust Vectoring - всеракурсное УВТ), а сам самолет - F-16 MATV. Поворот створок сверхзвуковой части сопла AVEN обеспечивал отклонение вектора тяги двигателя на угол до 17╟ в любом направлении. Первое ОВТ на самолете F-16 MATV в полете было выполнено 30 июля 1993 г. К моменту завершения программы MATV в марте 1994 г. на нем было выполнено 95 полетов. F-16 MATV использовался для оценки влияния всера-курсного УВТ на маневренные и тактические возможности истребителя в ближнем воздушном бою один на один и один против двух. Кроме того, он демонстрировал возможность внедрения двигателей с УВТ на строевые самолеты ВВС США. Всеракурсными управляемыми соплами P/YBBN (Pitch/Yaw Balance Beam Nozzles - балансирные сопла с отклонением по тангажу и курсу) фирмы Пратт-Уитни в 1995 г. оснастили два двигателя F100-PW-229, установленные на опытный самолет F-15B ╧71-0290, использовавшийся ранее по программе F-15S/MTD (см. выше). Новая летающая лаборатория получила название F-15 ACTIVE (Advanced Control Technology for Integrated Vehicles - перспективные технологии управления авиационными комплексами). Отклонение створок сверхзвуковой части сопел P/YBBN обеспечивало поворот вектора тяги двигателей на угол до 20╟ в любом направлении со скоростью перекладки до 120╟/с. Конструкция самолета была усилена для восприятия появившейся боковой составляющей тяги величиной примерно до 1800 кгс (расчетная вертикальная составляющая тяги - до 2800 кгс). Первый полет на F-15 ACTIVE с УВТ состоялся 27 марта 1996 г., а уже 24 апреля того же года было осуществлено первое отклонение вектора тяги для управления в боковом канале на сверхзвуковой скорости (М=1,6). В ходе испытаний диапазон полетных условий, при которых осуществлялось отклонение вектора тяги для управления по тангажу и по курсу, был расширен до скоростей, вдвое превосходящих скорость звука. В 1998 г. была проведена дальнейшая доработка самолета, в результате внесли изменения в систему управления вектором тяги (программа ILTV - Inner Loop Thrust Vectoring). В 1997 г. планировалось также испытать двигатель F100-PW-229 с соплом P/YBBN на экспериментальном самолете F-16 MATV, однако из-за отказа в финансировании эта программа реализована не была. Опыт, полученный в США при испытаниях летающих лабораторий с экспериментальными системами УВТ, нашел применение на перспективных истребителях пятого поколения. Как уже отмечалось, плоские сопла с УВТ в вертикальной плоскости применяются на серийных истребителях F/A-22 Рэптор, первые из которых должны поступить в строевую эксплуатацию в ВВС США к концу этого года. Однако при имеющейся простоте механизма ОВТ и преимуществах в обеспечении малой заметности такие сопла имеют ряд существенных недостатков. Основные из них связаны с потерями тяги при трансформации потока газов из осесимметричного за турбиной в плоский в сопле, а также со значительно большей массой конструкции плоского сопла, по сравнению с традиционным круглым. К тому же в плоском сопле гораздо сложнее реализовать УВТ в горизонтальной плоскости (сопло при этом получается еще более громоздким и тяжелым). В связи с этим на другом американском перспективном истребителе F-35 (JSF) сопло будет не плоским, а осесимметричным. Как уже отмечалось в предыдущем разделе, на модификации F-35B для Корпуса морской пехоты США, ВМС и ВВС Великобритании, отличающейся от других вариантов самолета возможностью укороченного взлета и вертикальной посадки, будет применяться осесимметричное трехсегментное сопло с отклонением тяги вниз на угол около 90╟, аналогичное по схеме использовавшемуся на российском СВВП Як-41М. А на вариантах F-35A для ВВС США и других стран, а также F-35C для ВМС США двигатель F135 (развитие F119-PW-100) будет комплектоваться осесимметричным соплом с всеракурсным УВТ. Подробности о его конструкции пока неизвестны, но, скорее всего, его схема подобна той, что была отработана на летающей лаборатории F-15 ACTIVE, оснащенной двигателями F100-PW-229 с соплами P/YBBN, т.е. предусматривает отклонение тяги во всех направлениях путем поворота створок сверхзвуковой части сопла. Поступление первых самолетов F-35 на вооружение запланировано на 2010-2012 гг. С учетом интернационального характера программы F-35 и того, что он в перспективе обещает стать единым истребителем стран НАТО и некоторых других государств (каким сейчас является F-16), можно предположить, что спустя 15-20 лет управление вектором тяги станет массовым явлением в истребительной авиации многих стран мира. Эксперименты с управлением вектором тяги двигателей для современных истребителей проводятся за рубежом не только в США. К подобным работам в 1995 г. приступили и в Европе, где испанская фирма ITP при поддержке германской MTU начала проектирование всеракурсного поворотного сопла TVN для выпускаемого консорциумом ╚Евроджет╩ (Eurojet), в который входят эти компании, двухконтурного турбореактивного двигателя с форсажной камерой EJ200 - основы силовой установки современного западноевропейского истребителя Eurofighter EF2000 ╚Тайфун╩ (Typhoon). Как и в американских проектах P/YBBN и AVEN, в испанском сопле реализовано всеракурсное отклонение вектора тяги (на угол до 20" в любую сторону) посредством управления створками его сверхзвуковой части. Стендовые испытания опытного двигателя EJ200-01A с экспериментальным соплом TVN начались в июле 1998 г. К февралю 2000 г. он наработал на стенде 80 ч, в т.ч. 15 ч - на форсаже, претерпев 6700 перекладок створок сопла со скоростью от 23,5 до 110╟/с На испытаниях была зафиксирована максимальная боковая составляющая тяги около 2000 кгс (что составляет почти одну треть от общей тяги EJ200 на максимальном режиме и более 20% от его тяги на полном форсаже). Летом 2000 г. были проведены испытания EJ200-01A с соплом TVN на высотном стенде в Штутгарте (Германия), а в ноябре того же года компания 1ТР объявила о предварительной договоренности с Германией и США провести летные испытания нового двигателя с УВТ на экспериментальном самолете Х-31 (см. выше). Первый его полет с EJ200-01A и соплом TVN мог состояться в конце 2002 - начале 2003 г. Кроме того, консорциумы ╚Еврофайтер╩ и ╚Евроджет╩ выразили совместное желание оснастить таким соплом один из двигателей первого опытного экземпляра ╚Тайфуна╩ - самолета DA1 - с возможным выходом его на испытания ╚после 2003 г.╩, а в дальнейшем, примерно с 2010 г., комплектовать двигателями с УВТ серийные EJ2000 так называемого третьего этапа поставки (Tranche-З). Полноразмерный макет EJ200 с действующим образцом сопла TVN с успехом демонстрировался на выставке в Фарнборо, однако с 2001 г. информация о дальнейших успехах и планах в отношении модификации EJ200 с УВТ поступать перестала. Возможно, программа была приостановлена. В Советском Союзе практические работы по управлению вектором тяги двигателей для перспективных истребителей и расширения маневренных возможностей самолетов четвертого поколения начались во второй половине 80-х гг., т.е. практически одновременно с США. В рамках создания в НПО ╚Сатурн╩ им. A.M. Люльки ТРДДФ пятого поколения АЛ-41Ф в классе тяги 18-20 тс для Многофункционального истребителя ОКБ им. А.И. Микояна (МФИ, проект ╚1.42╩) было разработано плоское сопло, предусматривавшее возможность отклонения вектора тяги. Аналогичные двигатели рассматривались и для проекта перспективного истребителя ╚ОКБ Сухого╩ с крылом обратной стреловидности С-32 (позднее получил обозначение С-37, а ныне известен как Су-47 ╚Беркут╩). Однако в дальнейшем от идеи применения плоского сопла в конструкции АЛ-41Ф отказались, перейдя к традиционному осесимметричному выходному устройству. Недостатки плоского сопла, послужившие причиной отказа от него и в конструкции российского ТРДДФ пятого поколения, уже излагались выше. Главные из них - потери тяги и значительное утяжеление конструкции двигателя и самолета в целом. Стоит правда заметить, что относительно недавно, на выставке ╚Двигате-ли-2002╩, AM НТК ╚Союз╩ представил полноразмерный макет своего нового двигателя Р179-300, проектируемого на базе подъемно-маршевого ТРДДФ четвертого поколения Р79В-300 с поворотным соплом, который использовался на СВВП Як-41М (см. выше). Нынешний двигатель демонстрировался в комплекте с плоским соплом, что предполагает возможность использования в нем УВТ. И хотя двигатели серии Р179-300 некоторое время рассматривались в качестве силовых установок перспективных боевых самолетов (в частности, одного из вариантов упомянутого выше С-37, опытный образец которого испытывается с 1997 г. с двумя ТРДДФ Д-30Ф-11), дальше проекта, макета и испытаний отдельных узлов нового двигателя у ╚Союза╩ дело, видимо, пока не пошло. В возможностях плоского сопла в Советском Союзе успели убедиться и экспериментально. В конце 80-х гг. НПО ╚Сатурн╩ им. A.M. Люльки в содружестве с уфимским НПО ╚Мотор╩ (главный конструктор А.А. Рыжов), ЦИАМ, ЛИИ, ╚ОКБ Сухого╩ и КнААПО был проведен цикл исследований по плоскому соплу с управлением вектором тяги в вертикальной плоскости, а также реверсированием тяги для эффективного торможения самолета при посадке и боевом маневрировании. Применение такого сопла также должно было способствовать значительному снижению уровня инфракрасной заметности летательного аппарата - параметра, которому придавалось большое значение при разработке перспективных боевых самолетов пятого поколения. Экспериментальное плоское сопло было изготовлено в НПО ╚Мотор╩ и установлено на левый двигатель АЛ-31Ф летающей лаборатории ЛЛ-УВ(ПС), созданной в 1990 г. на базе самолета Су-27УБ ╧02-02 производства КнААПО. С аэродрома ЛИИ на ЛЛ-УВ(ПС) было выполнено 20 полетов, в ходе которых были получены данные по значительному (в несколько раз) снижению уровня ИК-заметности двигателя с плоским соплом. К сожалению, недостаточное финансирование не позволило провести на этом самолете полный цикл летных испытаний по отработке УВТ и реверса. Но к этому времени в СССР уже были получены первые практические результаты по управлению вектором тяги посредством отклонения в вертикальной плоскости обычного осесимметричного сопла двигателя АЛ-31Ф, применяемого на всех истребителях семейства Су-27. С учетом проблем, с которыми пришлось столкнуться при разработке плоского сопла, именно такое направление было признано более целесообразным. Еще в 1986 г. коллектив НПО ╚Сатурн╩ им. A.M. Люльки, возглавляемый генеральным конструктором В.М. Чепкиным, начал проектирование первого варианта одношарнирного осесимметричного поворотного сопла для двигателя АЛ-31Ф, обеспечивающего отклонение вектора тяги в вертикальной плоскости в диапазоне углов ╠15╟. Такое сопло было установлено на двигатель АЛ-31Ф. Поворотным выполнялось все сопло двигателя (как на американских проектах F100MPJM/BBN и GEATRV). Серийный двигатель АЛ-31Ф с первым экспериментальным вариантом поворотного сопла с питанием приводной части системы его управления от гидравлической системы самолета был установлен в 1989 г. на самолет Т10-26 (Су-27 ╧07-02). В первый полет его поднял 21 марта 1989 г. летчик-испытатель Олег Цой. В испытаниях этой летающей лаборатории, называвшейся ЛЛ-УВ(КС), принимал участие также Виктор Пугачев. По результатам исследований АЛ-31Ф с экспериментальным поворотным соплом на Т10-26 было принято решение разработать серийный вариант двигателя с управляемым вектором тяги со следящими приводами, включенными в контур системы дистанционного управления самолетом. Два подобных двигателя было рекомендовано использовать на опытной модификации самолета Су-27М, на которой предстояло отработать влияние УВТ на маневренные характеристики истребителя, в т.ч. на закритических (вплоть до 90╟) углах атаки и скоростях полета, близких к нулевым. Такой модификацией стал опытный самолет Т10М-11 (╧711), известный в 1996-2000 гг. под названием Су-37. В 1995 г. его оснастили опытными двигателями АЛ-31Ф с поворотными в вертикальной плоскости соплами, боковой ручкой управления и тензометрическими РУД, а также модифицированной системой дистанционного управления СДУ-10МБР разработки МНПК ╚Авионика╩, обеспечивающей управление самолетом от боковой ручки, в т.ч. и за счет управления вектором тяги двигателей. В отличие от экспериментального варианта двигателя с поворотным соплом, испытывавшегося в 1989 г. на Т10-26, система управления вектором тяги на Су-37 была включена в контур СДУ самолета, что позволяло обеспечить управляемость самолета на сверхбольших углах атаки и скоростях полета, близких к нулевым. Первый вылет на самолете Т10М-11 с УВТ и новой системой управления выполнил 2 апреля 1996 г. летчик-испытатель ╚ОКБ Сухого╩ Евгений Фролов, осуществивший затем весь цикл испытаний этой машины. В ходе первых же полетов Фролов приступил к отработке на Су-37 новых фигур пилотажа: переворотам в вертикальной плоскости без изменения траектории поступательного полета (╚чакра Фролова╩), форсированным разворотам с минимальными радиусами, ╚управляемому штопору╩ и др. Помимо чисто демонстрационного эффекта, реализация режимов сверхманевренности, по мнению специалистов, обеспечивала истребителю Су-37 безусловное превосходство в ближнем бою над противником, не обладающим такими возможностями. Конструктивно управление вектором тяги каждого двигателя самолета Су-37 было реализовано в виде поворотного осесимметричного сопла, закрепленного на кольцевом поворотном устройстве и отклоняемого в вертикальной плоскости двумя парами гидроцилиндров в диапазоне углов ╠15╟. В качестве рабочего тела системы поворота сопел на Су-37 применялась гидросмесь от бортовой гидравлической системы самолета. Самолет Су-37, пилотируемый летчиком-испытателем Евгением Фроловым, в сентябре 1996 г. был впервые продемонстрирован мировой публике на выставке в Фарнборо (Великобритания). В последующие несколько лет Су-37 неоднократно принимал участие в различных авиасалонах и аэрошоу как в России, так и за рубежом. И везде показательные выступления Героя России Е.И. Фролова на Су-37 вызывали восхищение зрителей, отдававших должное уникальным возможностям самолета и мастерству летчика. Программа испытаний самолета Т10М-11 с двигателями АЛ-31Ф с УВТ завершилась в 2000 г. Развитием двигателя АЛ-31Ф с поворотным осесимметричным соплом, отработанного на Су-37, стал серийный ТРДДФ АЛ-31ФП для сверхманевренного многофункционального истребителя Су-30МКИ, разработанного по заказу ВВС Индии. По контракту от 30 ноября 1996 г. Иркутскому авиационному заводу предстояло поставить в эту страну 40 таких самолетов (забегая вперед следует сказать, что после уточнения контракта и заключения дополнительных соглашений всего в Индию отправили 32 самолета Су-30МКИ с двигателями АЛ-31ФП с УВТ и 18 самолетов Су-30К с обычными ТРДДФ АЛ-31Ф). Первый опытный самолет Су-30МКИ с двумя двигателями АЛ-31ФП с УВТ совершил первый полет 1 июля 1997 г., его испытания проводил летчик-испытатель ╚ОКБ Сухого╩ Вячеслав Аверьянов. Как и опытные АЛ-31Ф с УВТ, применявшиеся на самолете Т10М-11, двигатель АЛ-31ФП оснащается поворотным в пределах ╠15╟ соплом. Однако в отличие от опытных двигателей, у АЛ-31ФП ось поворота сопла отклонена от продольной плоскости симметрии на 32╟, что позволяет при дифференциальном отклонении сопел двух двигателей получить не только вертикальную, но и боковую составляющую тяги. В сочетании с возможностью автоматического дифференциального изменения тяги двух двигателей (так называемое управление ╚разнотягом╩) это обеспечивает управление самолетом во всех плоскостях на сверхмалых и околонулевых скоростях полета, когда обычные аэродинамические органы управления теряют свою эффективность. Система управления вектором тяги на Су-30МКИ включена в систему дистанционного управления самолетом и не имеет каких бы то ни было отдельных рычагов управления. Для повышения надежности система управления вектором тяги АЛ-31ФП выполнена автономной, работающей на керосине, отбираемом от системы топливопитания двигателя, и не зависит от гидросистемы самолета. Серийный выпуск двигателей АЛ-31ФП освоен Уфимским моторостроительным производственным объединением (ОАО ╚УМПО╩, г. Уфа). Управление вектором тяги, прогрессивная аэродинамическая компоновка и эффективная система управления обеспечили Су-30МКИ поистине уникальные маневренные возможности. Летчик-испытатель Вячеслав Аверьянов освоил на этом самолете такой комплекс пилотажа, который в то время не был доступен ни одному другому боевому самолету в мире, и с 1998 г. с блеском демонстрирует его на различных авиационных выставках в России и за рубежом. Для летных испытаний по программе Су-30МКИ в период с 1997 по 2001 гг. было выпущено в общей сложности два опытных и четыре предсерийных самолета с двигателями АЛ-31ФП, а с 2002 г. начались поставки серийных Су-30МКИ в Индию. Они успешно завершились в декабре 2004 г., когда в Индии началось лицензионное производство таких истребителей (всего по контракту от 28 декабря 2000 г. здесь планируется изготовить в период до 2017 г. 140 Су-30МКИ). Поступив к настоящему времени на вооружение уже двух эскадрилий ВВС Индии, Су-30МКИ стал, таким образом, первым в мире строевым боевым самолетом с УВТ. А вскоре подобные машины появятся еще в одной стране: по контракту от 5 августа 2003 г. НПК ╚Иркут╩ поставит начиная с 2006 г. в Малайзию 18 самолетов Су-30МКМ с двигателями АЛ-31ФП с УВТ. Стоит заметить, что самолеты семейства Су-27/Су-30, оснащенные двигателями с УВТ, разрабатываются не только для зарубежных заказчиков. Так, летом 2003 г. комплектом двигателей АЛ-31Ф серии 3 с поворотными соплами (аналогичными применяемым на АЛ-31ФП) был оснащен опытный корабельный учебно-боевой и многофункциональный самолет Су-27КУБ. Применение УВТ повысило маневренные и взлетно-посадочные характеристики этого самолета корабельного базирования, что было подтверждено испытаниями Су-27КУБ на ТАВКР ╚Адмирал Кузнецов╩ в Баренцевом море в ноябре 2004 г. Технически нет принципиальных проблем устанавливать подобные двигатели с УВТ и на другие самолеты семейства Су-27 для Вооруженных Сил России. В частности, применение УВТ рассматривается для модернизированных истребителей Су-27СМ2 (для ВВС России) и Су-35 (на экспорт). Как известно, такие машины должны последовать за нынешними Су-27СМ и Су-ЗОМК и стать промежуточным шагом к будущему истребителю пятого поколения - Перспективному авиационному комплексу фронтовой авиации (ПАК ФА), разрабатываемому сейчас в ╚ОКБ Сухого╩. Согласно сообщениям в печати, на последнем найдут применение двигатели АЛ-41Ф1 разработки НПО ╚Сатурн╩, являющиеся глубокой модернизацией нынешних АЛ-31Ф с использованием технологий, опробованных при создании ТРДДФ пятого поколения АЛ-41Ф. Судя по всему, на них также будет реализовано управление вектором тяги посредством отклонения осесимметричного сопла. Опытные образцы таких двигателей (видимо, пока еще без системы УВТ) с марта 2004 г. проходят испытания на летающей лаборатории Т10М-10 (Су-27М ╧710). Считается, что двигатели типа АЛ-41Ф1 смогут найти применение и на упомянутых выше Су-27СМ2 и Су-35. Серийный выпуск таких силовых установок будет налажен на УМПО. Альтернативный вариант ╚ремоторизации╩ строевых самолетов типа Су-27 разработан также на другом моторостроительном предприятии, выпускающем серийные двигатели АЛ-31Ф - ММПП ╚Салют╩. Модернизированные на этом заводе двигатели АЛ-31Ф-М1 (а затем АЛ-31Ф-М2 и АЛ-31Ф-МЗ) могут оснащаться соплами с всеракурсным отклонением вектора тяги за счет одновременного поворота створок сверхзвуковой части сопла. Подобная конструкция системы УВТ спроектирована на ╚Салюте╩ с участием специалистов ╚Завода им. В.Я Климова╩, разработавших систему ОВТ ╚КЛ МВТ╩ (подробнее об этом - в следующем разделе). Согласно материалам ММПП ╚Салют╩, к моменту проведения выставки ╚Двигатели-2004╩ в апреле 2004 г. наработка реактивного сопла с УВТ в составе двигателя типа АЛ-31Ф на стендах составила уже 400 ч. Величина угла отклонения вектора тяги достигала 16╟ в каждую сторону, а скорость перекладки сопла - 60╟/с. За полгода до этого ╚салютовский╩ АЛ-31Ф-М1 с УВТ демонстрировался на статической стоянке МАКС-2003 в составе силовой установки летающей лаборатории ЛИИ Су-27П ╧37-11 (бортовой ╧595). На этом самолете двигатель АЛ-31Ф-М1, имеющий повышенную, по сравнению с серийным АЛ-31Ф, тягу, к тому моменту уже прошел серию летных испытаний. На очереди была летная отработка на нем сопла с УВТ, однако, судя по всему, из-за недостатка финансирования приступить к ней пока не удалось. В середине 90-х гг. к разработке собственного варианта системы отклонения вектора тяги двигателей для истребителей класса МиГ-29 приступили на санкт-петербургском ╚Заводе им. В.Я. Климова╩ - предприятии, где были разработаны применяемые на этом самолете ТРДЦФ четвертого поколения РД-33, а в дальнейшем создавались их новые модификации. Кстати, в этом году исполняется 25 лет, как РД-33 был запушен в серийное производство на московском заводе ╚Красный Октябрь╩ (ныне - ММП им. В.В. Чернышева), где оно осуществляется и поныне. За прошедшее время двигатель претерпел ряд изменений, направленных на повышение его надежности и увеличение ресурса, в результате чего он и сегодня не уступает, а по ряду параметров превосходит свои зарубежные аналоги. Двигателями РД-33 укомплектован весь парк истребителей МиГ-29, эксплуатируемых сейчас в России, семи странах СНГ и более чем двух десятках стран дальнего зарубежья. Помимо увеличения тяги, улучшения экономичности и дальнейшего повышения эксплуатационных показателей, одним из основных направлений дальнейшего развития двигателей семейства РД-33 на ╚Климове╩ определили создание модификации с отклоняемым вектором тяги. Проанализировав имевшийся к тому времени зарубежный и отечественный опыт, на заводе пришли к мнению, что наиболее целесообразно реализовать идею поворота не всего осесимметричного сопла, а только его сверхзвуковой части. По сравнению с поворотом всего выхлопного устройства (как, например, на двигателе АЛ-31ФП), это позволяло уменьшить массу конструкции, сделать ее достаточно простой и технологичной, повысить быстродействие механизма перекладки сопла, а главное - обеспечить возможность всеракурсного отклонения вектора тяги в любом направлении. К началу 1997 г. на ╚Климове╩ был спроектирован и изготовлен первый опытный образец сопла с поворотной сверхзвуковой частью. В ходе стендовых испытаний в составе двигателя в течение 50 ч выполнили около 1000 перекладок сопла на всех режимах работы, включая полный форсаж. Максимальные углы отклонения вектора тяги составляли + 15╟ во всех направлениях, а скорость перекладки достигала 30╟/с (в дальнейшем ее довели до 60╟/с). Конструктивная схема сопла предусматривает одновременный поворот всех сверхзвуковых створок на заданный угол за счет воздействия на них через тяги одного общего управляющего кольца, приводимого в движение тремя гидроприводами, которые в свою очередь прикреплены к неподвижному силовому поясу на форсажной камере. Положение концов штоков гидроприводов в трех точках однозначно определяет положение управляющего кольца в пространстве и, соответственно, направление вектора тяги. Вследствие появления дополнительных продольных и поперечных сил, воздействующих на сопло и корпусную систему двигателя при отклонении вектора тяги, некоторые элементы конструкции форсажной камеры пришлось усилить. Одновременно с введением сопла с ОВТ в конструкцию двигателя планировалось внести ряд других изменений, направленных, в частности, на повышение тяговых характеристик: на полном форсаже тяга должна была возрасти с 8300 до 9000 кгс, а на максимальном режиме - с 5040 до 5600 кгс. На нем должна была найти применение новая цифровая система регулирования. Такой двигатель получил обозначение РД-133, и под таким названием демонстрировался весной 1998 г. на выставке ╚Двигатели-98╩, а летом следующего года - на МАКС-99. Однако в дальнейшем под маркой РД-133 ╚Завод им. В.Я. Климова╩ представлял уже обычный серийный двигатель РД-33, но оснащенный рассмотренной выше системой ОВТ. Сейчас от этого названия отказались, и модификация с отклоняемым вектором тяги именуется просто ╚РД-33 с ОВТ╩. В конце 90-х гг. аналогичным соплом с ОВТ ╚Завод им. В.Я. Климова╩ планировал комплектовать и создававшиеся на базе РД-33 более мощные и современные модификации тягой до 10-12 тс. На различных выставках они фигурировали под названиями РД-333, РД-ЗЗ-10М, ВКС-10М и т.п. По всей видимости, это намерение разработчика сохраняется, меняются только марки новых модификаций популярного ТРДДФ. Планировалось, что уже в конце 1997 г. на летающей лаборатории МиГ-29 смогут начаться летные испытания двигателя РД-33 с ОВТ. К сожалению, в то время средств у заказчика на это не нашлось. Тем не менее, в 2001 г. два двигателя с ОВТ были все же установлены на опытный самолет МиГ-29М ╧156, участвовавший до 1993 г. в летных испытаниях по программе МиГ-29М (типа ╚9-15╩). Под маркой МиГ-29ОВТ он демонстрировался в статической экспозиции МАКС-2001. А еще спустя два года самолет смогли подготовить к летным испытаниям, и в августе 2003 г. летчик-испытатель РСК ╚МиГ╩ Павел Власов выполнил на нем первый полет с отклонением вектора тяги. К моменту проведения авиасалона МАКС-2003 налет истребителя с экспериментальной системой ОВТ был еще недостаточным, и перекрашенный по яркой красно-белой схеме МиГ-29М ╧156 (МиГ-29ОВТ) не рискнули допускать к программе демонстрационных полетов, ограничившись показом на статической стоянке. На этой выставке стало известно, что подобными двигателями с ОВТ предполагается комплектовать будущие серийные истребители МиГ-29М и МиГ-29М2, и на сопроводительном планшете, установленном рядом с самолетом ╧156, было указано, что в состав силовой установки МиГ-29М/М2 войдут два двигателя РД-33МК с ОВТ с тягой на полном форсаже 9000 кгс. К началу августа 2005 г. на летающей ч лаборатории МиГ-29ОВТ ╧156 летчиками РСК ╚МиГ╩ Павлом Власовым и Михаилом Беляевым выполнено уже более 50 полетов с отклонением вектора тяги, отработана как сама система ОВТ и управления ей, так и ее связь с системой дистанционного управления самолетом. Полученные результаты полностью удовлетворяют разработчиков и, по мнению главного конструктора РСК ╚МиГ╩ Николая Бунтина, программа испытаний близка к завершению. Двигатель с ОВТ можно запускать в серийное производство для будущих серийных МиГ-29М и МиГ-29М2. Пока же изготовлено пять РД-33 с ОВТ (два из них проходили стендовые испытания, два установлены на МиГ-29ОВТ ╧156 и один поставлен для летных испытаний в качестве запасного). Исследуя проблему ОВТ, на ╚Заводе им. В.Я. Климова╩ пришли к выводу, что разработанную конструкцию сопла с всеракурсным отклонением его сверхзвуковой части можно не только применять на ТРДДФ типа РД-33, но и адаптировать к двигателями других типов, в т.ч. зарубежного производства. Технология создания унифицированной системы ОВТ получила название КЛИВТ - ╚Климовский вектор тяги╩ (в английском написании - Klimov's Vectoring Thrust, KLIVT). По мнению руководства РСК ╚МиГ╩, самолеты МиГ-29М и МиГ-29М2 представляют собой будущее поколение модификаций популярного истребителя МиГ-29, выпущенного к настоящему времени в количестве около 1500 экземпляров. Если МиГ-29СМТ рассматривается как основной вариант модернизации ранее построенных МиГ-29, то МиГ-29М и МиГ-29М2 будут самолетами новой постройки, которую, при получении соответствующих заказов, планируется начать в ближайшее несколько лет. А перспективы у таких заказов весьма серьезные. Как известно, МиГ-29М и МиГ-29М2 будут представлены на тендер, который планируют объявить ВВС Индии по программе MRCA (Multirole Combat Aircraft), предусматривающей закупку и лицензионное производство 126 перспективных многоцелевых истребителей для замены снимаемых с вооружения истребителей третьего поколения МиГ-23МФ и дополнения парка остающихся в строю ВВС этой страны самолетов МиГ-29 и ╚Мираж╩ 2000Н. Одноместный МиГ-29М (╚9-61╩) и двухместный МиГ-29М2 (╚9-67╩) имеют максимальную степень унификации конструкции, оборудования и вооружения. Унифицированными на них являются даже головные части фюзеляжа и фонари кабины. Все отличия заключаются в том, что вместо кресла и информационно-управляющего поля в кабине второго летчика на одноместной машине размещается дополнительный топливный бак. Кроме того, по конструкции, оборудованию и вооружению МиГ-29М/М2 в значительной степени унифицированы с корабельными истребителями МиГ-29К (╚9-41╩) и МиГ-29КУБ (╚9-47╩), строящимися в настоящее время по заказу ВМС Индии. Первый полет опытного экземпляра МиГ-29КУБ намечен на декабрь этого года, опытного экземпляра МиГ-29К - на весну 2006 г. Серийные поставки 12 МиГ-29К и четырех МиГ-29КУБ в Индию по контракту от 20 января 2004 г. должны начаться в 2007 г. и продолжаться до 2009 г., после чего возможно производство по опциону еще 30 таких машин. Важной особенностью самолетов МиГ-29М и МиГ-29М2 является также высокая общность с выпускаемым сейчас модернизированным МиГ-29СМТ по составу бортового радиоэлектронного оборудования и вооружения. В результате, большинство испытательных полетов в интересах программ МиГ-29СМТ и МиГ-29К могут быть зачтены и по программе МиГ-29М/М2, поэтому сроки создания и освоения производства последних могут быть очень короткими. В настоящее время в испытаниях по тематике новых модификаций МиГ-29 принимают участие девять самолетов: три МиГ-29СМТ, два МиГ-29УБ, два опытных МиГ-29К (╧311 и 312, переоборудованные из опытных самолетов предыдущего типа ╚9-31╩), МиГ-29М2 ╧154 (переоборудован из четвертого летного экземпляра МиГ-29М типа ╚9-15╩) и МиГ-29ОВТ ╧156 (переоборудован из последнего предсерийного самолета МиГ-29М типа ╚9-15╩). На самолете ╧154 уже отработана конструкция и аэродинамика новой унифицированной головной части фюзеляжа самолетов МиГ-29М/М2/К/КУБ и связанные с ней бортовые системы, а также (впервые на самолетах МиГ-29) испытана коротковолновая радиосвязь. На трех МиГ-29СМТ и двух МиГ-29УБ завершается летная отработка унифицированного БРЭО и вооружения. МиГ-29ОВТ ╧156 используется как летающая лаборатория для доводки двигателей РД-33 с ОВТ. Двигатели с отклоняемым вектором тяги станут основой силовой установки будущих серийных МиГ-29М и МиГ-29М2. Применение всеракурсного отклонения вектора тяги на этих самолетах позволит осуществлять не только управление истребителем на маневре (в т.ч. на режимах сверхманевренности - на очень больших углах атаки и минимальных скоростях), но и стабилизацию параметров полета по всем трем осям при обычном пилотировании, обеспечивая сокращение затрат на балансировку и, соответственно, расхода топлива. Пространственное ОВТ дает возможность получать большие угловые скорости крена и обеспечивать эффективное управление по курсу при полете на больших углах атаки, когда традиционные аэродинамические органы управления значительно утрачивают свою эффективность, а также существенно увеличивать угловые скорости по тангажу. Вообще, применение всеракурсного ОВТ сделает управление МиГ-29М/М2 более точным, более уверенным и более энергичным, практически не зависимым от величины угла атаки, причем как при выполнении элементов сверхманевренности, так и при традиционном пилотировании. Это не только будет давать МиГ-29М/М2 как дополнительные серьезные преимущества в воздушном бою, но и существенно снизит нагрузку налетчика (экипаж), позволив . ему больше внимания уделять непосредственно решению боевых задач. А внешнюю, демонстрационную сторону применения ОВТ на самолете типа МиГ-29М можно увидеть на МАКС-2005.
----------         
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
  |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||


 Линейный вид
Линейный вид
